Запоминающий реверсивный счётчик витков. Изготовление намоточного станка своими руками Реверсивный счетчик витков на ттл
Ознакомившись с рядом опубликованных в журнале конструкций счётчиков различного назначения (например, ), я принял решение разработать свой вариант счётчика витков, в котором использована энергонезависимая память микроконтроллера. В результате удалось создать простой и удобный в работе счётчик витков для намоточного станка, не содержащий дефицитных деталей.
Он способен считать от 0 до 9999 оборотов вала, после чего показания индикатора обнуляются и счёт начинается заново. При вращении вала в обратную сторону индикатор уменьшает показания на единицу на каждый оборот.
Рис. 1
Счётчик состоит из нескольких узлов (рис. 1). Основой конструкции служит микроконтроллер DD1, к которому через токоограничительные резисторы R10—R16 подключён четырёхразрядный светодиодный индикатор HG1. Две оптопары — излучающий ИК диод— фототранзистор (VD2VT1, VD3VT2), — образующие датчик числа оборотов рабочего вала станка, формируют импульсы низкого уровня, по которым микроконтроллер определяет направление вращения и число оборотов вала. Предусмотрена кнопка SB1 для обнуления памяти, а также вспомогательные цепи: R2C2, работающая в составе встроенного тактирующего генератора микроконтроллера, VD1C1, сохраняющая напряжение питания, необходимое для перехода микроконтроллера в режим SLEEP, и R6R8, следящая за напряжением питания счётчика.

Известно, что микроконтроллеры семейства PIC довольно капризны при работе с EEPROM (особенно, когда запись в неё происходит автоматически). Уменьшение напряжения питания может исказить содержимое памяти При работе счётчика линия RB1 (вывод 7) микроконтроллера, к которой подключена цепь R6R8, опрашивается на наличие напряжения питания, и если оно пропадает, то благодаря цепи VD1C1 микроконтроллер успевает перейти в спящий режим, тем самым блокируя дальнейшее выполнение программы и защищая информацию в EEPROM. В процессе счёта микроконтроллер будет сохранять в памяти числа после каждого оборота рабочего вала станка. При каждом очередном включении питания индикатор HG1 отобразит то число, что было до отключения.
Датчик представляет собой небольшую печатную плату (22x22 мм), на которой смонтированы два излучающих диода и два фототранзистора, установленных так, что образуют два оптических канала передатчик—приемник. Оптические оси каналов параллельны, межосевое расстояние — около 10 мм.
На рабочем валу станка неподвижно закреплена шторка в виде диска из жёсткого непрозрачного для ИК лучей материала (текстолит, гетинакс, металл, пластик) толщиной 1...2 мм. Диаметр шторки — 35...50 мм, диаметр центрального установочного отверстия равен диаметру вала. Плату на станке фиксируют так, чтобы шторка, вращаясь вместе с валом, могла перекрывать собой оба ИК луча.
В шторке пропиливают вырез в форме неполного сектора. Угловая ширина и глубина выреза должны быть такими, чтобы при вращении вала шторка обеспечивала кратковременное прохождение ИК излучения сначала только через один канал, затем через оба и, наконец, только через другой, как это схематически проиллюстрировано на рис. 2. Цветом показаны каналы, открытые в той или иной позиции. Такой порядок следования сигналов с датчика даёт микроконтроллеру возможность определять направление вращения рабочего вала станка
.
Счётчик рассчитан на питание от батареи из трёх гальванических элементов АА (R6), но можно использовать любой сетевой блок со стабилизированным выходным напряжением 5 В.
Датчик смонтирован на печатной плате из фольгированного стеклотекстолита толщиной 1 мм. Чертёж платы показан на рис. 3. Токоограничива-ющий резистор R3 припаян со стороны печатных проводников а излучающие диоды и фототранзисторы — с другой.
Остальные детали (кроме батареи GB1 и выключателя SA1) размещены на второй плате, изготовленной из такого же стеклотекстолита. Её чертёж представлен нарис. 4. Все резисторы (кроме R3) на ней размещены со стороны печати поверхностным монтажом, а микроконтроллер, цифровой индикатор, конденсаторы, диод, кнопка SB1 и проволочные перемычки — с противоположной стороны. Микроконтроллер установлен в панель, впаянную в плату.
Плата датчика скреплена с основной двумя скобами, согнутыми из медной лужёной проволоки диаметром 1,2 мм и припаянными к краевым печатным проводникам плат. Для крепления плат к корпусу станка использованы самодельные держатели с ушком для винта, изготовленные из такой же проволоки и также припаянные к основной плате.

Рис. 4

Общий вид одного из конструктивных вариантов счётчика, установленного на намоточном станке, показан на фото рис. 5. Батарея гальванических элементов с выключателем прикреплены к станку сзади.
Для датчика, кроме указанных на схеме, можно использовать излучающие диоды SEP8706-003, SEP8506-003, KM-4457F3C, АЛ144А, АЛ108АМ и другие, а фототранзисторы — SDP8436-003, КТФ102А. Очень хорошо подходят также оптопары от старых шариковых компьютерных манипуляторов — мышей; у излучающих диодов короткий вывод—катод, а у фототранзисторов — эмиттер.
Следует заметить, что лучше использовать фототранзисторы в непрозрачном (чёрном) корпусе — в этом случае вероятность сбоев и ошибок в счёте из-за попадания на фотоприемники световых помех от внешних ярких источников будет минимальна. Если же фототранзисторы, имеющиеся в наличии, прозрачные, на каждый из них следует на деть отрезок чёрной ПВХ трубки с отверстием напротив линзы, а весь датчик закрыть от постороннего света накладкой из чёрной бумаги. Если шторка изготовлена из отражающего свет материала, её рекомендуется покрыть чёрной матовой краской.
Вместо "поверхностных" резисторов можно использовать МЛТ-0,125 или С2-23 мощностью 0,062 Вт. Кнопка SB1 — любая, подходящая по месту крепления на плате. Вместо E40281-L-O-0-W подойдёт цифровой индикатор FYQ-2841CLR.

Программа микроконтроллера разработана и отлажена в среде Proteus, после чего с помощью программатора ICProg загружена в микроконтроллер. После установки микроконтроллера в панель при первом и последующих включениях счётчика индикатор отобразит знак "минус" во всех знакоместах. Примерно через две секунды на табло появятся нули — это признак готовности счётчика к работе.
В программе предусмотрена функция аварийного обнуления памяти на тот случай, когда в неё попадёт ошибочная информация и микроконтроллер "зависает" (такое бывает крайне редко, но быть может). Для возвращения микроконтроллера в рабочий режим нужно выключить питание счётчика, нажать на кнопку "Обнуление" и, не отпуская её, включить питание. Как только табло отобразит нули, можно продолжать работать, но информация о прежнем числе витков будет, разумеется, утрачена.
В налаживании правильно собранное устройство не нуждается.
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает - от тут и началось! Поиск по интернетам дал некоторые возможные варианты станко-построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, а также герконы с калькуляторами. Хм …. На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов. Serega с РадиоКота : «Хорошие электронщики, зачастую - плохие механики !». Может я и не лучший электронщик - но механик уж точно паршивый.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой - это ж не много - не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 - наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 - эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
О кнопках сразу не сказал - а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 - включает режим намотки (режим установлен по умолчанию) - с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 - режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» - в минус сматываться не будет:)
S4 - чтение сохраненной в EEPROM информации.
S5 - запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла - 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
С датчика холла TLE4905L (можно попробовать и другой воткнуть, я выбирал по принципу «что подешевле и есть в наличии») сигнал поступает на контроллер, генерируется прерывание и изменяется текущее значение, в зависимости от выбранного режима. Контроллер отсылает информацию на сдвиговые регистры, с которых она, в свою очередь, отправляется на семисегментные индикаторы либо на клавиатуру. Семисегментники применял с общим катодом, у меня был сразу квартет в одном корпусе, но желающим никто не мешает прикрутить 2 сдвоенных или 4 одиночных соединив параллельно аноды. Точка на индикаторах не используется, соответственно вывод H (dp) висит в воздухе. Работают индикаторы в динамическом режиме, поэтому сопротивления в R3-R9 номиналом меньше расчётных. На транзисторах VT1-VT4 собраны драйверы для индикаторов. Можно было применить и специализированные микросхемы типа ULN2803, но решил на транзисторах, по той простой причине, что у меня их скопилось - «как грязи», некоторым из них лет больше чем мне.
Кнопки S2-S4 - а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера. Пересылка инфы на индикацию и на сканирование клавы происходит на большой частоте (внутренний генератор в тини13 настроен на 9,6МГц), соответственно как быстро мы не пытались бы нажать и отпустить кнопку, за время нажатия произойдет много срабатываний и соответственно нолик с кнопки побежит на встречу единичке с контроллера. Ну и такая неприятная вещь как дребезг контактов кнопок опять же.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать - береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
IC1 - микроконтроллер ATtiny13, можно применить с литерой V. Распиновка для варианта в SOIC-е такая же как на схеме. Если у кого то возникнет желание применить в корпусе QFN/MLF - тому даташит в руки.
IC2-IC3 - 8-ми разрядные сдвиговые регистры с защелкой на выходе - 74HC595, на макете я использовал в корпусах DIP на плате в готовом устройстве в SOIC-е. Распиновка одинаковая.
IC4 - цифровой однополярный датчик холла TLE4905L. Обвязка по даташиту R2 - 1k2, C2-C3 по 4n7. При установке датчика на станок проверить на какую сторону магнита он реагирует.
C1, C4 и C5 - конденсаторы фильтрующие питание, я ставил по 100n, должны быть установлены, как можно ближе к питающим выводам микросхем.
R1 - резистором подтягиваем ногу ресет к питанию, 300Ом - и далее. Я ставил 1k.
R3-R9 - токоограничительные резисторы для индикаторов. 33 Ом - 100 Ом, чем больше сопротивление, тем соответственно тусклее будут светить.
R10-R13 - ограничивают ток в цепях баз транзисторов. На макете стояли по 510 Ом, в плату вкрутил по 430 Ом.
VT1-VT4 - КТ315 с любыми буквенными индексами, можно заменить на КТ3102, КТ503 и аналоги.
R14-R15 как писалось выше для предотвращения «драки», думаю можно поставить от 1k и выше, но не задирать выше 4k7. При R16-R17 равных 300 Ом, суммарное сопротивление последовательно соединенных резисторов, не должно превышать 5k, в ходе моих экспериментов с повышением сопротивления выше 5k появлялись ложные срабатывания кнопок.
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство».
Плату разводил в SL, причем развел скорее всего не оптимально - подгонял под имеющиеся детали, лень мне было на рынок ехать покупать другие. В общем развел, напечатал на прозрачной односторонней пленке Lomond для черно-белых лазерных принтеров. Печатал в негативе, в 2х экземплярах. Негатив - потому как собирался ПП делать с помощью пленочного фоторезиста, а он в свою очередь NEGATIVE. А в 2х экземплярах - чтоб при совмещении получился максимально непрозрачный слой тонера. Нет у меня желания ещё и балон с аэрозолем TRANSPARENT
21
покупать.
Совмещаем фотошаблоны, выставляя "на просвет", чтоб идеально совместились отверстия закрепляем обычным степлером - к этой процедуре нужно подойти ответственно, от неё во многом зависит качество будущей платы.
Теперь надо подготовить фольгированный текстолит. Кто-то трет его мелкой шкуркой, кто-то ластиком, а я, в последнее время, предпочитаю следующие варианты:
1. Если медь не шибко засрата окислами, достаточно её протереть тампоном смоченым в нашатырном спирте - ох и вонючая херня доложу я Вам, не нравится мне это занятие, но зато шустро. Идеально медь блистеть после этого не будет, но окислы спирт смоет и плата протравится.
2. Если же медь загажена порядочно, я её полирую войлочным кругом. Вешаю его на дрель и вуаля. Особо тут усердствовать не надо, пасту ГОИ я не применяю, для последующей протравки достаточно только войлочного круга. Быстро и эффективно.
В общем подготовили - фото выложить не могу, блистит зараза как зеркало и ничего не видно на фотке, фотограф из меня тож паршивый.
Ну да ладно, далее будем накатывать фоторезист.
Надо признать что фоторезист у меня уже вышел и срока годности и к плате собака липнуть отказывается, поэтому приходится предварительно плату греть. Я грею феном, но можно и утюгом. Хорошо бы конечно для этих целей ламинатор иметь, но:
- бабла мне на него теперь жалко
- когда бабла было не жалко было тупо лень:)
На горячую плату накатываем фоторезист, не забыв снять защитную пленку. Стараемся это делать максимально аккуратно, чтоб между платой и фоторезистом небыло воздушных пузырей. Бороться с ними потом - отдельная жопа. Если же пузыри все-таки появились, прокалываю их иглой.
Накатывать можно при любом освещении и не заниматься хернёй вспоминая любителей-фотографов, главное в нашем деле отсутствие солнечных лучей и других источников ультрафиолета.
После накатки, прогреваю плату горячим утюгом через газету, этим лечятся проколотые пузыри, ну и фоторезист прилипает намертво.
Далее накладываем шаблон на плату, здесь плата двухсторонняя, потому шаблон будет с обеих сторон платы. Кладём этот "бутерброд" на лист оргстекла и прижимаем воторым листом сверху. 2 листа нужны для того, чтоб после засветки одной стороны, можно было аккуратно перевернуть плату не сдвинув фотошаблон.
Засвечиваем с другой стороны. Я пользуюсь вот такой лампой:
Засвечиваю с растояния где-то 150мм в течении 7 минут (расстояние и время подбираются экспериментально).
Далее готовим слабый щелочной раствор - чайная ложка кальцинированной соды на пол литра воды. Температура воды - не принципиальна. Размешиваем чтоб растворилась вся сода. Для рук этот раствор не опасен, на ощупь как мыльная вода получается.
Снимаем с нашей платы защитную пленку и кидаем в раствор, после чего активно кисточкой начинаем тереть - но особо не нажимаем, чтоб не посдирать дорожки. Можно конечно и не тереть, но тогда есть вариант смываться фоторезист будет:
- долго
- смоется всё
а нам не то не другое не подходит, посему трем.
получаем что-то похожее:
Промываем плату водой, раствор не выливаем - он нам ещё пригодится. Если в процессе проявки платы какие-то дорожки всёж отслоились либо воздушные пузыри дорожки подпортили, необходимо эти места подретушировать цапонлаком либо специальным маркером. Далее травим плату. Я пользую хлорное железо.
После травления опять промываем плату водой и кидаем обратно в щелочной раствор, чтоб смыть более не нужный фоторезист. Часика хватает.
Далее лудим. Для маленьких плат или шибко ювелирных пользуюсь сплавом Розе, для таки вот плат - тупо паяльником с плоским жалом размазываю олово по плате. Плату в этом случае имеет мысл покрыть флюсом, я пользуюсь обычным спирто-канифольным.
Кому-то может показаться что дорожки вышли не шибко ровными - дорожки вышли ровными:) это издержки метода лужения паяльником, олово не равномерно ложится.
В законченом варианте кнопка сброса отсутствует - ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания - защита от переполюсовки. Что касается остальных деталек - то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся:)
Теперь точно всё, всем спасибо за внимание, а товарищам GP1 и Avreal за помощь в разработке.
В радиолюбительской практике, часто возникает необходимость намотать/перемотать различные обмотки трансформаторов, дросселей, реле и др. .
При разработке данного станка, ставились следующие задачи:
1. Малые габариты.
2. Плавный старт шпинделя.
3. Счётчик до 10000 витков (9999).
4. Намотка с автоматической укладкой провода. Шаг укладки (диаметр провода) 0.02 - 0.4мм.
5. Возможность намотки секционных обмоток без перенастройки.
6. Возможность закрепления и намотки каркасов без центрального отверстия.
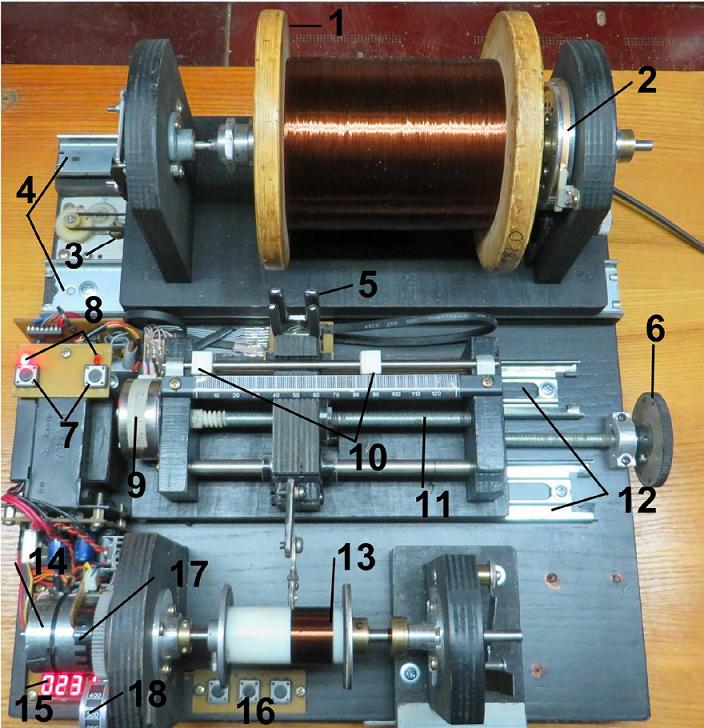
Рисунок 1.
Внешний вид намоточного станка.
Состав намоточного станка.
1. Подающая бобина (катушка с проводом).
2. Притормаживание (тормозной механизм).
3. Шаговый двигатель центровки бобины.
4. Шариковые мебельные направляющие.
5. Шторка оптических датчиков механизма центровки бобины.
6. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
7. Кнопки ручного переключения направления укладки.
8. Светодиоды направления укладки.
9. Шаговый двигатель позиционера.
10. Шторки оптических датчиков границы намотки.
11. Винт позиционера.
12. Шариковые мебельные направляющие.
13. Наматываемая катушка.
14. Двигатель намотки.
15. Счётчик витков.
16. Кнопки настройки.
17. Оптический датчик синхронизации.
18. Регулятор скорости.
Устройство и принцип действия.
Подающий узел.
Подающий узел предназначен для закрепления на нём бобины с проводом, различных величин, и обеспечения натяжения провода.
В него входит механизм крепления бобин и механизм подтормаживания вала.

Рисунок 2.
Подающий узел.
Подтормаживание.
Без подтормаживания подающей бобины, намотка провода на каркасах будет рыхлая и качественной намотки не получится. Войлочная лента «2», тормозит барабан «1». Поворот рычага «3», натягивает пружину «4» - регулировка силы торможения. Для разной толщины провода, настраивается своё притормаживание. Здесь используются готовые детали видеомагнитофона.

Рисунок 3.
Подтормаживающий механизм.
Центровка бобины.
Малые габариты станка и расположение в непосредственной близости, наматываемой катушки и подающей бобины с проводом, потребовали ввести дополнительный механизм центровки подающей бобины.


Рисунок 4, 5.
Центрирующий механизм.
При намотке катушки, провод с бобины воздействует на шторку «5», выполненной виде “вилки” и шаговый двигатель «3», через редуктор с делением 6 и зубчатый ремень, по роликовым направляющим «4», автоматически сдвигает бобину в нужном направлении.
Таким образом, провод всегда находится по центру см. рис 4, рис 5:

Рисунок 6.
Датчики, вид сзади.
Состав и устройство датчиков.
19. Оптические датчики механизма центровки бобины.
5. Шторка перекрывающая датчики механизма центровки бобины.
20. Шторки перекрывающие датчики переключения направления позиционера.
21. Оптические датчики переключения направления позиционера.
Позиционер.
Шторками «20» рис. 6 - выставляется граница намотки. Шаговый двигатель, перемещает механизм укладчика, пока шторка не перекроет один из датчиков «21» рис. 6, после чего меняется направление укладки.
В любой момент можно изменить направление укладки кнопками «1» рис. 7.

Рисунок 7.
Укладчик.
Скорость вращения шагового двигателя «9» рис. 7, синхронизирована с помощью датчика «10», «11» рис 8, с вращением наматываемой катушки и зависит от диаметра провода установленного в меню. Диаметр провода, может быть выставлен 0.02 - 0.4мм. С помощью ручки «8» рис. 7, можно передвинуть весь позиционер в сторону, не изменяя границы намотки. Таким образом, можно намотать другую секцию в многосекционных каркасах.

Рисунок 8.
Оптодатчик.
Состав позиционера и оптодатчика (рис. 7-8).
1. Кнопки ручного переключения направления укладки.
2. Светодиоды направления укладки.
3. Шторки перекрывающие датчики переключения направления позиционера.
4. Линейный подшипник.
5. Капролоновая гайка.
6. Ведущий винт. Диаметр 8мм, шаг резьбы 1,25мм.
7. Шариковые мебельные направляющие.
8. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
9. Шаговый двигатель.
10. Оптический датчик синхронизации.
11. Диск, перекрывающий датчик синхронизации. 18 прорезей.
Приёмный узел.

Рисунок 9.
Приёмный узел.


Рисунок 10, 11.
Приёмный узел.
1. Счётчик витков.
2. Коллекторный высокоскоростной двигатель.
3. Шестерня редуктора.
4. Кнопка «сброс счётчика».
5. Регулировка скорости.
6. Включатель «Старт намотки».
7. Крепёж наматываемой катушки.
Вращение наматываемой катушки, производит коллекторный высокооборотный двигатель через редуктор.
Редуктор состоит из трёх шестерён с общим делением 18. Это обеспечивает необходимый вращающий момент на малых оборотах.
Регулировка скорости двигателя, производится изменением питающего напряжения.


Рисунок 12, 13.
Крепление каркаса имеющего отверстие.
Конструкция приёмного узла позволяет закреплять, как каркасы имеющие центральное отверстие, так и каркасы, таких отверстий не имеющие, что хорошо видно на рисунках.


Рисунок 14, 15.
Крепление каркаса не имеющего отверстие.
Электрическая схема.

Рисунок 16.
Электрическая схема намоточного станка.
Всеми процессами станка, управляет микроконтроллер PIC16F877.
Индикация количества витков и диаметра провода, отображается на светодиодном четырёх знаковом индикаторе. При нажатой кнопке «D», отображается диаметр провода, при отжатой количество витков.
Для изменения диаметра провода, нажать кнопку «D» и кнопками «+», «-» изменить значение. Установленное значение автоматически сохраняется в EEPROM. Кнопка «Zerro» - обнуление счётчика. Разъём «ISCP» служит для программирования микроконтроллера.
P.S. Чертежей механической части не существует, потому что устройство изготовлялось в одном экземпляре, и конструкция формировалась в процессе сборки.
В данной конструкции были использованы имеющиеся в разборке элементы и узлы (не имеющие маркировки) от видеомагнитофонов и принтеров.
Ни в коем случае я не настаиваю в точном повторении данной конструкции, а лишь как в использовании каких-либо узлов от неё в своих конструкциях.
Повторение данного устройства возможно опытными радиолюбителями, имеющие навыки работы с механикой и способными изменить конструкцию под свои, имеющиеся механические части.
Механическая часть соответственно, может быть реализована по другому.
Редукторы на двигателях, могут быть и с другим делением.
Критические элементы:
Чтобы программа работала правильно, необходимо соблюсти ряд условий, а именно;
Оптический датчик «17» рис 1. , может быть другой конструкции, но обязательно на 18 отверстий.
Винт позиционера, обязательно с шагом 1,25мм - это стандартный шаг для винта диаметром 8мм.
Шаговый двигатель позиционера 48 шагов/оборот, 7.5 градусов/шаг - это самые распространённые двигатели в оргтехнике.
Демонстрационный ролик работы станка:
Ниже в прикреплении (в архиве) собраны все необходимые файлы и материалы для сборки намоточного станка.
Если по сборке и наладке у кого-то возникнут какие либо вопросы, то задавайте их на форуме. По возможности постараюсь ответить и помочь.
Желаю всем удачи в творчестве и всего наилучшего!
Архив "Намоточный станок"."
Вариант 1: ATmega8 + Nokia 5110 LCD + питание 3V
В схеме используются Atmega8-8PU (внешний кварц частотой 8MHz), Nokia 5110 LCD и транзистор для обработки импульсов от геркона. Регулятор напряжения на 3,3V обеспечивает питание для всей цепи.
Все компоненты были смонтированы на макетной плате, включая разъемы для: ISP - программатора (USBAsp), 5110 Nokia LCD, питания (5V, подаваемого на 3.3V - регулятор), геркона, кнопки сброса и 2-контактный разъем, используемый для считывания полярности обмотки двигателя привода станка, чтобы знать, увеличивать или уменьшать счетчик.
Назначение разъемов:
J1: Питание. На разъем поступает 5V и дальше на стабилизатор L7833 для получения напряжения 3,3V, используемого ATmega8 и LCD.
J2: Разъем для ЖК-дисплея, идущий на Nokia 5110 LCD.
J3: Геркон. Вход импульсов для подсчета микроконтроллером.
J4: Разъем полярности. Он должен быть подключен параллельно обмотке двигателя. Схема слежения была расчитана для 12-вольтового двигателя, но ее можно применить под другое напряжение двигателя, регулируя номиналы делителей напряжения, образованные R3-R4 и R5-R6. Если двигатель подключен к прямой полярности, на PD0 будет высокий лог. уровень, если двигатель подключен к обратной полярности, то на PD1 будет высокий лог. уровень. Эта информация используется в коде для увеличения или уменьшения счетчика.
J5: Сброс счетчика. При нажатии кнопки, произойдет обнуление счетчика.
Разъем ISP: это 10-контактный разъем для программатора USBAsp AVR.
Схема устройства
Фото готового устройства





Вариант 2: ATmega8 + 2x16 HD44780 LCD + питание 5V
Некоторые из моих читателей попросили сделать вариант счетчика в котором используется дисплей 2x16 HD44780 (или меньший вариант 1x16). Для этих дисплеев требуется напряжение питания 5V, поэтому стабилизатор на 3,3V не актуален.
Схема устройства


Биты конфигурации микроконтроллера для обоих вариантов: LOW - 0xFF, HIGH - 0xC9.
| Архив для статьи "Счетчик витков для намоточного станка" | |
| Описание:
Исходный код(Си), файлы прошивок для микроконтроллера |
|
| Размер файла: 111.35 KB Количество загрузок: 257 |
В работе радиолюбителей и электриков полезны устройства для наматывания медного провода диаметром 1,5 мм на специальную электрическую катушку. В промышленных условиях данный процесс требует скорости и точности. Домашние мастера могут воспроизвести такую технологию. Для этого понадобится самодельный намоточный станок. Для него характерны такие признаки:
- простота создания и эксплуатации;
- возможность использования разных трансформаторов;
- наличие дополнительных функций: подсчет количества проволочных мотков.
Метод работы намоточного станка
Станок для намотки – востребованное оборудование, с помощью которого наматывают трансформаторные однослойные и многослойные катушки цилиндрического типа и всевозможные дроссели. Намоточное устройство равномерно распределяет проволоку обмотки с определенным уровнем натяжения. Оно бывает ручным и автоматическим, и работает по такому принципу:
- Вращение рукоятки задает намотку проводки или кабеля на каркас катушки. Она служит основанием изделия и надевается на специальный вал.
- Проволока перемещается горизонтально благодаря направляющему элементу укладчика.
- Количество витков определяют специальные счетчики. В самодельных конструкциях эту роль может выполнять велосипедный спидометр или магнитно-герконовый датчик.
Ручной прибор для укладки провода довольно примитивный, поэтому редко применяются на производстве.
Намоточный станок на механическом приводе позволяет выполнять сложную обмотку:
- рядовую;
- тороидальную;
- перекрестную.

Он функционирует с помощью электрического двигателя, который задает движение промежуточного вала с использованием ременной передачи и трехступенчатых шкивов. Большую роль при этом играет фрикционная муфта сцепления. Благодаря ей станок работает плавно, без толчков и обрывов проволоки. Шпиндель с закрепленной оправой, на которую надета катушка, производит запуск счетчика. Намоточный станок настраивается с помощью винта под любую ширину катушечного каркаса.
Современные модели оснащены цифровым оборудованием. Они работают посредством специально заданной программы, которая хранит информацию в запоминающем устройстве. Значение длины и диаметра провода позволяет точно определить точку пересечения линий.

Механизм намоточного станка
Станок для намотки классифицируют по группам:
- рядовой;
- универсальной;
- тороидальной намотки.



Каждое изделие имеет индивидуальную конструкцию.
Намоточный станок, выполняющий рядовую укладку проволоки, состоит из таких элементов:
- Механизм намотки имеет вид сварной рамы, которая оборудована двигателем, зубчато-ременной передачей, передней и задней бабкой.
- Механизм раскладки позволяет перемещать длинномерный материал вдоль оси намотки. Это сварная конструкция, по которой двигается каретка с направляющими роликами для провода.
- Модели устройств отличаются друг от друга габаритами и функциональными возможностями.

Стандартная модель прибора для укладки провода несколькими перегибами за один оборот предполагает наличие таких элементов:

- Основной каркас, состоящий из деревянных или металлических стоек, которые занимают вертикальное положение.
- Между опорами расположены две горизонтальные оси: одна предназначена для пластин, другая – для катушки.
- Сменные шестерни, посылающие на катушку вращение.
- Рукоятка, которая вращает катушечную ось. Для ее фиксации используют цанговый зажим.
- Фиксаторы: гайки, винты.
Намотка проволоки на тороидальные сердечники осуществляется посредством специализированного оборудования кольцевого типа:
- Приспособление имеет вид челнока, работающего по принципу швейной иглы.
- Шпуля представляет собой механизм двух пересекающихся колец с вынимающимся сектором, на который устанавливают тороидальный каркас.
- Вращение шпули задает электродвигатель.

Необходимые материалы и комплектация для изготовления
Чтобы собственноручно сделать станок для намотки проволоки на круглый каркас, понадобится несколько деталей.
Станина из листового материала, скрепленного сварочным методом. Оптимальная толщина основания – 15 мм, боковых частей – 6 мм. Устойчивость конструкции обеспечивается ее тяжестью:

- Боковые части прикладывают друг к другу, одновременно просверливают в них отверстия.
- Подготовленные элементы приваривают к основанию.
- В высоко расположенные пробоины монтируют втулки, в нижние – подшипники, которые можно взять из использованного дисковода.
- Крепежные детали с внешней стороны боковин надежно фиксируют крышками.
Важные составляющие конструкции станка – валы:
- Верхний вал диаметром 12 мм держит каркас катушки. Его роль может исполнять аналогичная конструктивная деталь вышедшего из строя матричного принтера.
- На средний вал такого же диаметра опирается устройство подачи длинномерного материала. Перед вводом в эксплуатацию его желательно отполировать.
- Нижний вал является подающим элементом. Его размеры зависят от шага резьбы.

Втулка укладчика диаметром и длиной по 20 мм. Ее внутренняя резьба совпадает с резьбой нижнего вала.
Шкивы – трехступенчатые, выточенные из стали, общей толщиной не более 20 мм. В противном случае придется увеличить хвостовики верхнего и нижнего валов. Каждый блок содержит три канавки с разным диаметром, в зависимости от сечения проволоки. Их ширина определяется пассиками. Такая комбинация обеспечивает большое разнообразие шагов намотки провода.
Устройство укладчика проволоки
Укладка и намотка проволоки осуществляются за счет трех пластин, скрепленных между собой винтами диаметром 20 мм. В верхней части делают небольшое отверстие 6 мм, куда вставляют винт регулировки натяжения:
- В верхнюю и нижнюю часть внутренней пластины монтируют фторопластовую и стальную втулки диаметром и длиной по 20 мм.
- Между наружными элементами вклеивают кожаный желобок толщиной до 2-х мм, необходимый для выравнивания и натягивания проволоки катушки.
- Вверху укладчика монтируют специальный стержень с резьбой или мини-струбцину, которая скрепляет внешние пластины и регулирует натяжение. Расстояние крепления зависит от диаметра провода.
- Для удобства работы конструкцию дополнительно оснащают откидным кронштейном для катушки.

Изготовление счетчика витков
Для определения количества намотанных витков на станке необходим специальный счётчик. В самодельном станке устройство делают так:

- К верхнему валу крепят электромагнит.
- Герметизированный контакт располагают на одной из боковин.
- Выведенные контакты геркона соединяют с калькулятором в том месте, где находится кнопка «=».
- Катушку с проводом размещают отдельно – на другом валу с рычагами, которые поднимают устройство вверх и складывают его внутрь станка.
Благодаря этим элементам, оборудование становится компактным и не занимает много места.
Принцип работы на станке
Трудиться на сконструированном станке несложно. Технологический процесс требует выполнения определенных действий:
- Верхний вал подготавливают к работе: снимают шкив, задают нужную длину каркаса катушки, устанавливают правый и левый диски.
- В отверстие верхнего вала вставляют крепежное изделие, центрируют и зажимают каркас специальной гайкой.
- На подающий вал монтируют нужный шкив для первичной обмотки.
- Напротив каркаса катушки устанавливается укладчик.
- Пассик одевают на шкивы кольцом или восьмеркой, в зависимости от вида укладки.
- Металлический провод заводят под дополнительный вал, укладывают в желобок, закрепляют.
- Натяжение проволоки регулируют при помощи зажимов, расположенных вверху укладчика.
- Провод должен плотно наматываться на основу катушки.
- На калькуляторе фиксируют числовое значение «1+1».
- Каждый оборот вала прибавляет заданный счет.
- Если витки нужно отмотать назад, на вычислительном устройстве нажимают «–1».
- Когда провод достигнет противоположной части каркаса, с помощью цангового зажима меняют положение пассика.
Под разную толщину металлического провода соотносят шкив с шагом намотки.
